先日、このような投稿を見つけました
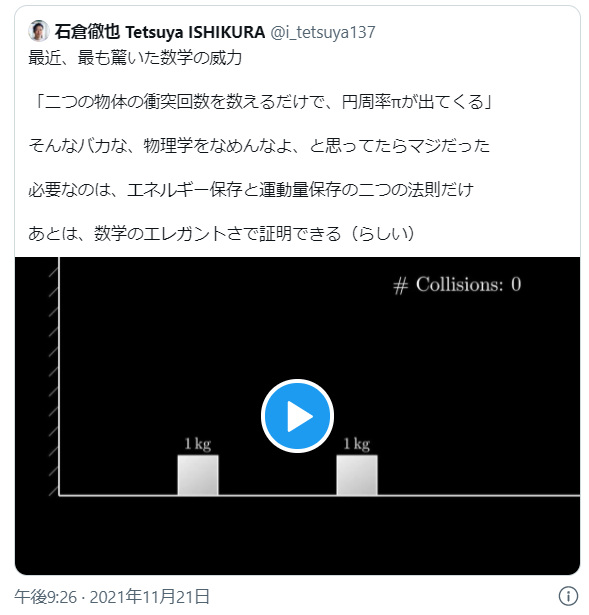
1 kgの物体に対して100のn乗 kgの物体を水平にぶつけると、壁側の物体の衝突数は314159265…となり、円周率が求められるというものです
多くの人は、このツイートのように「そんな馬鹿な」と最初に思うはずです
そこで、車輪の再発明とはなりますが、これを画像処理を用いたシミュレーションで確かめることにしました
まずはその背景となる物理を理解することにします
理解するついでに、解説することにしました
前提条件
改めて、この物理の前提条件を書きます
それは下の図に示す通りです
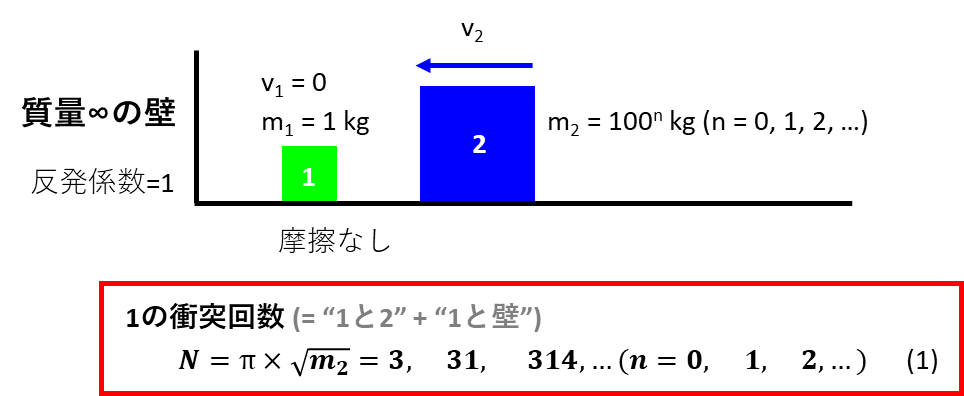
左から、質量無限の壁(動かない)、質量1 kgの物体1(緑)、質量m2 = 100n kgの物体2(青)があります
壁は、速度vで衝突してきたものを、速度マイナスvで逆方向に返します(反発係数が1)
物体1は、最初は停止しています
一方で物体2は、摩擦ゼロの床上を左に速度v2で向かってきており、物体1に衝突します
この衝突をプラス1として数えます
さらに、速度v1で動き始めた物体1は壁にぶつかり、跳ね返ります
この衝突も、プラス1として数えます
この一連の動作を繰り返すと、最終的な衝突数Nは314159265…になります
実は結論から言うと、上図の赤枠内の式(1)として表したように、衝突数Nはπ×√m2となります
このように質量m2にはルートがついているため、質量m2が100nであることによって、最終的な衝突数は円周率3.14の10倍や100倍といったきれいな数字になってくれます
では、なぜこうなるのかを見ていきましょう
位相空間を描く
この現象を視覚的に理解するために、位相空間を描いてみましょう
位相空間とは、難しそうな名前ですが、ただのグラフです
なんのグラフかというと、今ある2つの物体の速度v1とv2をそれぞれヨコ軸・タテ軸に表示したグラフです
v1とv2の間にどのような関係式が成り立つかを考えれば、例えばy=xで直線を表すかのような描画が可能になります
今回成り立つ関係式は次の通りです
①運動エネルギー(E)保存の法則
②運動量保存(M)の法則
という2つです
これらについて、v1とv2を用いて具体的に表した数式は、下図ように、式(2)と式(3)になります
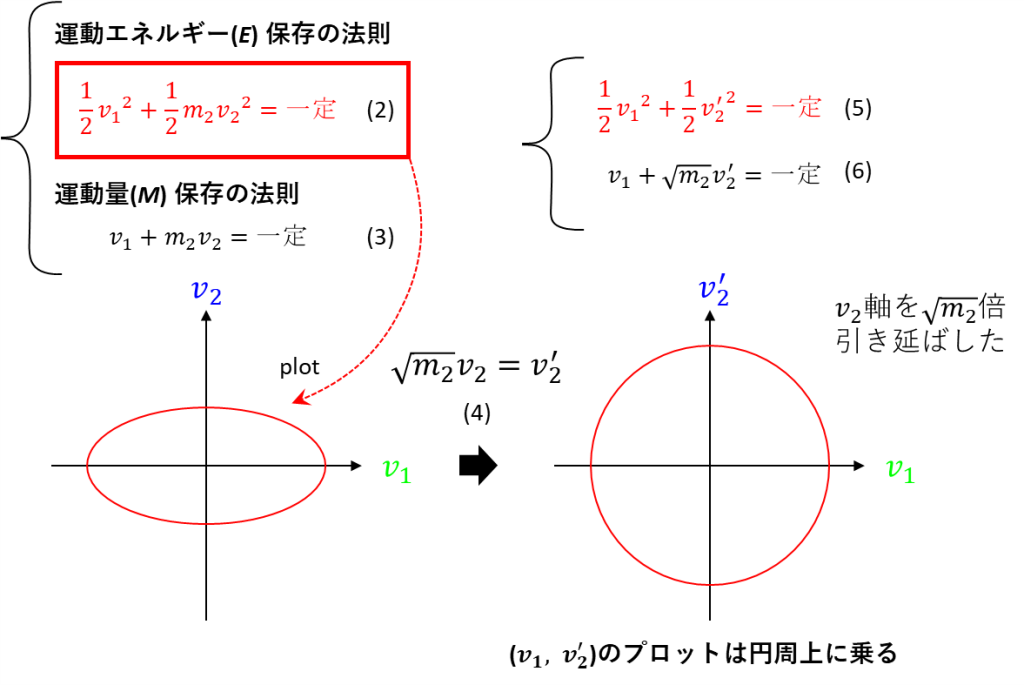
ここで式(2)を位相空間上にプロットしたものが、図の左下の楕円形となります
2つの物体の速度v1、v2がこの赤い楕円の円周上にある間は、エネルギーが保存されているということです
このようにエネルギー保存の法則が円形でなく楕円形となるのは、物体2が小さい速度であっても大きい質量を有しており、速度ではなく質量という形でエネルギーを貯めておけるためです
ただこの楕円は、人間にとって捉えにくい形状であるので、縦軸を√m2倍引き延ばすことで、正円に変換しましょう
これは式(4)の式を適用することで可能です
これによって、式(2)は式(5)の形になり、「x2+y2=一定」という正円の方程式に一致します(上図の右側)
同時に、式(3)は式(6)の形になります
注意点として挙げられるのが、新たな縦軸はv2ではなくv2‘になっていることです
つまり、これからは(v1, v2)のペアではなく、(v1, v2‘)のペアをプロットすることになります
(v1, v2‘)のプロット点は、常にこの新しい正円の円周上にある、ということになります
位相空間上のプロット点の変動を考える
では、物体の衝突を考えていきます
ここでは、話を簡単にするために、物体1と物体2はどちらも質量が1 kgであるとします
1 = 100の0乗であり、n = 0の場合に相当します
まずは、物体2が速度-1で動いているとき(左をマイナスと定義)、すなわちまだ衝突数が0であるときの位相空間上のプロットを見ましょう
このときの状況を下の図の左側に示します
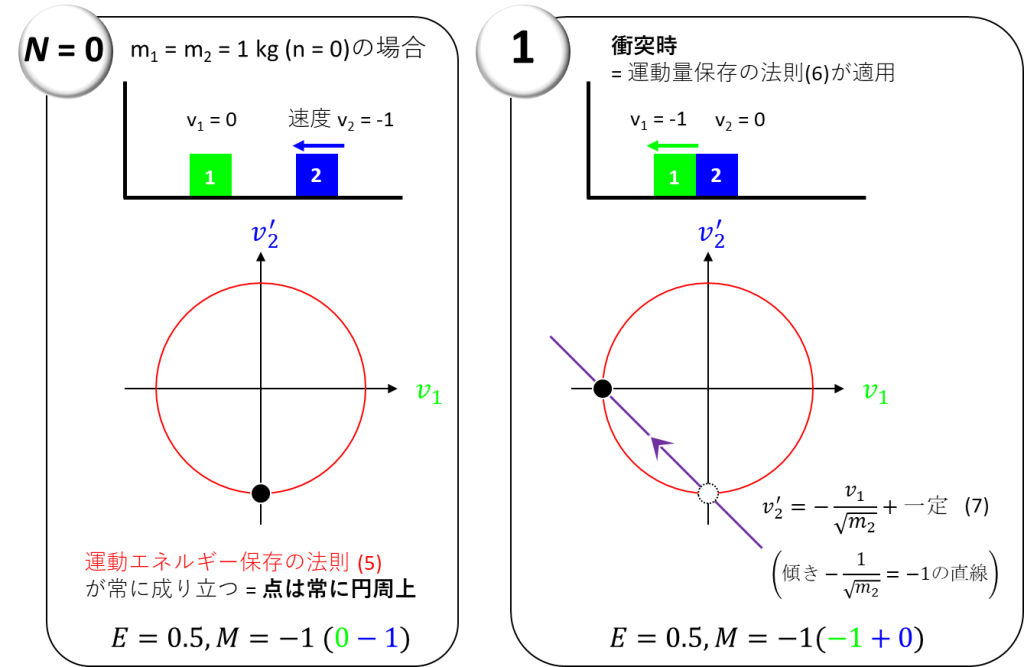
物体1は速度が0ですから、(v1, v2‘)のプロットは(0, -1)となり、赤い円周上の最下部にあることが確認できます
このとき、物体1と物体2のエネルギーの合計Eは、式(5)より0.5であり、このあとも一生そのままです
一方で、物体1と物体2の運動量の合計Mは、式(6)より-1であり、物体1と物体2の衝突時のみ一定値として保たれます
[衝突数N=1]そこで、次に物体1と物体2が衝突してみたとします(上の図の右側)
衝突が起きるわけですから、(v1, v2‘)のペアは今までの値を捨て、それぞれ新しい値をとります
その新しい値のペアはまた赤い円周上に生じます
では、そのどこかというと、これを求めるときに運動量保存の法則を使います
運動量保存の法則を示す式(6)は、式(7)の「v2‘ = 傾き×v1+切片」という形に変換できるわけです
この式(7)の形は、傾きが-1/√m2の直線に対応しています
今回のm2 = 1という場合では、その傾きは-1になります
つまり点(0, -1)を通るこの直線と、赤い円の交点が、新しい(v1, v2‘)の位置となります
新しい(v1. v2‘)は、赤い円周上の最も左側にある点(-1, 0)です
このことは、物体2のエネルギーが完全に物体1に移り、物体2が停止する代わりに物体1が動きだすことを意味しています
[衝突数N=2]動きはじめた物体1は、次に左の壁にぶつかり、逆向きに反発します
当然、このときもエネルギー保存の法則は一定のまま、E=0.5を保持します
しかし、この衝突は”物体1と壁”の衝突ですから、”物体1と物体2″の間にある運動量保存の法則は成り立ちません
物体1が反転することによって速度は-1から+1に変化し、これに伴って運動量の合計Mも-1から+1に変化します
この挙動は、位相空間上においては下図左のように、紫の右向きの水平線で表されます
このようにして、(v1, v2‘)は新しい点(1, 0)に移動するわけです
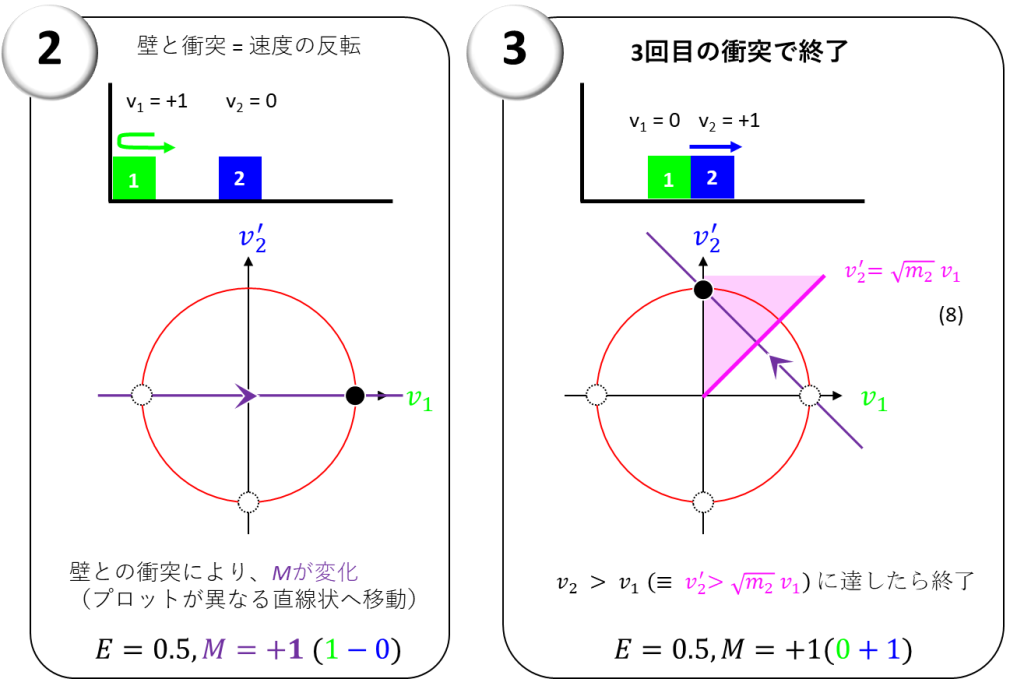
残るは、右向きになった物体1が物体2に衝突するのみです
この場合も、運動量保存の法則が成り立ちますから、 式(7)を活用することができます
この式は位相空間上において、図の右側に示した通り、(v1, v2‘)が一番右の(1, 0)から一番上の(0, 1)へ向かう直線に対応します
一般に、v2 > v1 > 0という状況になると、遅い物体1はより速い物体2に追いつきませんから、衝突は終了します
この関係はv2‘ > √m2 × v_1と書き換えることができ、図のピンクの領域に対応します
点(0, 1)はこのピンクの領域に収まっているので、衝突は終了ということになります
今回の衝突数の合計は3であり、これは円周率3.14の3となります
Nはπ×√m2 ですので、m2が100なら衝突数は31に、m2が10000なら衝突数は314になります
位相空間の図解
位相空間上のプロットの挙動が分かったところで、Nとm2の関係を詳しく見ていきましょう
上で示した一連の衝突は、円周上におけるプロットの変遷であり、円を分割することによって、3つの等しい大きさの円弧を生じています(下図の左)
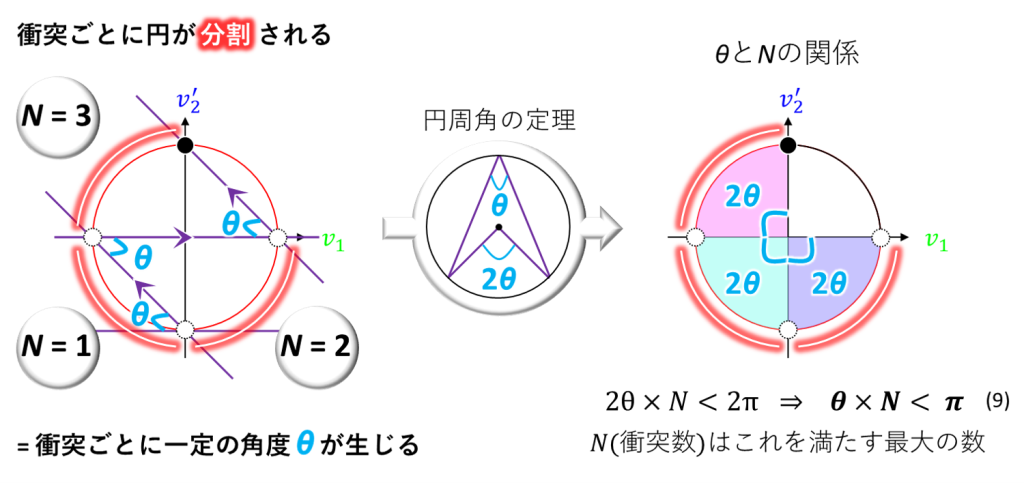
また、これらの点をつないでいくと、一回の衝突ごとに、水色で表される角度θが生成していることが確認できます
ここで、円周角の定理を用います
円周角θと対応する中心角は2θの大きさで表されるという定理ですね(上図の中央)
これを用いると、分割によって生じた3つの円弧は全て、2θの中心角を有することが分かります
ここでθとNの関係について確実に言えることは、N個ある2θを合計した角度である2θ×Nは、2π(360度)に満たないということです
これは、2θ×N < 2πと表すことができ、式(9)のようにθ×N < πと書き換えられます
この式を満たしている限り、Nはどこまでも大きくなることができます
物体1と2の質量がどちらも1 kgであるとき、図からθはπ/4であり、式(9)よりN < 4(N = 3)となることが確認できます
【補足】
上の図を見ると、 2θ×N = 3π/4と思われる方もいらっしゃるかもしれません
たしかに、1 kg vs. 1 kgという今回の場合ではそうですが、一般的ではありません
試しに、N = 4まで衝突が起きる場合を考えてみてください
この場合は、第一象限にある円周上にもう一つのプロット点が増えます
すると、第一象限の円周も分割され、新たなθを生じるわけです
このとき2θ×N は3π/4を超えており、2θ×N = 3π/4 はもはや満たされないことが分かると思います
したがって、いつも確実に言える一般事象は、 θ×N < π ということになります
θと物体2の質量の関係
では、急に出てきたθとは、物理的にはどんな意味をもつのでしょうか
物体2の質量m2とどのような関係があるのでしょうか
これは下の図から明らかにすることができます
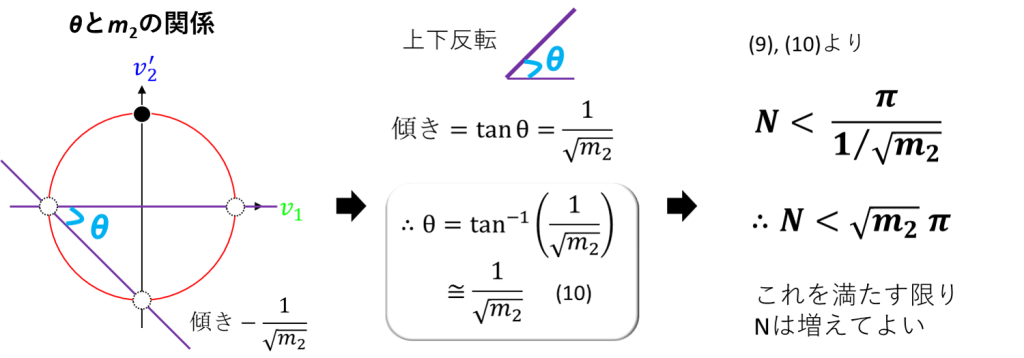
θとは、式(7)と横軸の間の角度です
ここで、式(7)は傾きが-1/√m2の直線です
図のθを形成する2つの直線を上下反転させてみると、この傾きは+1/√m2に対応します
さらに、この傾きはtanθです
つまり、tanθ = 1/√m2がなりたちます
これをθについて解くと、θ = arctan(1/√m2)と表すことができます
一般に、εが小さいとき、arctan(ε) = εとして近似してよいことになっています
このため、さらにθはθ = 1/√m2 …式(10)として書き換えることができるわけです
Nと物体2の質量の関係
式(9)より、Nとθの関係がわかりました
また式(10)より、θとm2の関係が分かりました
ということは、これらを組み合わせれば、Nとm_2の関係が分かりますね
これが、上の図の右側で表したように、N < √m2 × πとなるわけです
m2が100 kgなら √m2×π は31.415…であり、Nはこれを満たすまで増えてよいのです
したがって、衝突数は円周率の10倍や100倍に対応しており、m2が大きいほどに、その精度は向上します
これで、この衝突の物理を理解することができました
次回は、これをProcessingを用いた画像処理でシミュレーションします
読んでいただきありがとうございました。